SIAT新闻网

IEEE/ASME | 可变直径适应的亚厘米级纯软体胶囊机器人
近日,中国科学院深圳先进技术研究院微创中心高兴副研究员团队与运城学院杜阳阳博士在亚厘米级管道/腔道机器人取得重要进展。团队基于介电弹性体(DEA)开发的电活性球囊外廓仅8mm,结合鞭毛驱动原理创新设计了一款可自适应管道内径变化的变直径纯软体胶囊机器人。初代样机验证了其整体柔顺性可适应S形、小曲率大转角管路特征,同时实现了1.33倍变直径入路(12~16mm),满足Murray's law预测的树状管路分岔口的1.26倍直径变化,在管路内典型的环形台阶障碍也可轻松通过。相关成果以A Single Chamber Minibot With Elastic Hinges for Adapting Various Diameter Pipelines为题,发表在IEEE/ASME TRANSACTIONS ON MECHATRONICS。论文第一作者为运城学院杜阳阳博士,通讯作者为中国科学院深圳先进技术研究院高兴副研究员。
传统电机驱动的管道内爬行机器人解决了大直径管道内巡检需求,但无法满足小直径管道(≤20mm)。以气动或智能材料驱动器为驱动单元是实现管道内爬行机器人微小型化的关键,但面临高效率(爬行速度)、长距离与大变径比(最大适应管径与最小适应管径之比)无法兼得的问题。例如,气动机器人可以实现大变径比,但由于气体/管壁摩擦阻尼,远距离响应迟滞严重。DEA驱动的爬行机器人虽然可以实现1BL/s以上的爬行速度,但变径比仅有1.1,限制了障碍通过能力。
团队提出了一种DEA与气动单元结合的高爬行速度、大变径比且能长距离爬行的亚厘米级管道/腔道机器人。它主体由中心内嵌的卷制型DEA、可变形充气外胆以及24个弹性铰链鬓毛组成(图2)。主要亮点如下:
1) 主动调节外廓:利用气压控制外胆凸起变形,实现柔性铰链鬓毛倾角的主动变形,实现大变径比1.33(图3)。
2)低管径敏感性:柔性铰链鬓毛旋转变形替代传统鬓毛的弯曲变形,降低了鬓毛与管壁之间的法向约束力及相应的正向运动摩擦力。
3)高过障碍能力:利用轴向分布多组鬓毛保持良好的摩擦力各向异性,使机器人可以通过0.6mm的环形台阶。
4)高频共振驱动:利用卷制型DEA的高频轴向共振变形(~430Hz),爬行速度最快可达3BL/s,同时规避了气动驱动的迟滞效应(图6)。
5)高适用性:在没有优化鬓毛材质的情况下,机器人有效行程可达4m以上,且能通过金属管道以及复杂弯曲管道(图7)。
论文链接:https://doi.org/10.1109/TMECH.2025.3587461.

图1 机器人初代样机
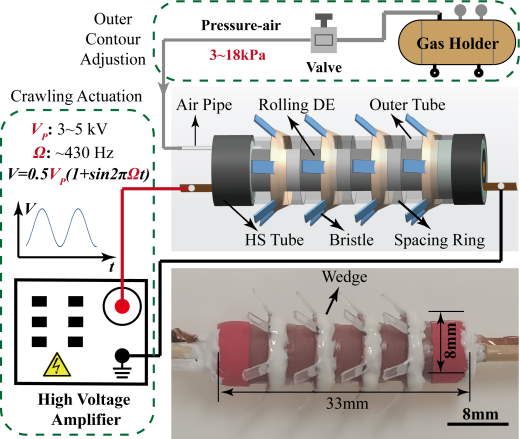
图2 机器人结构
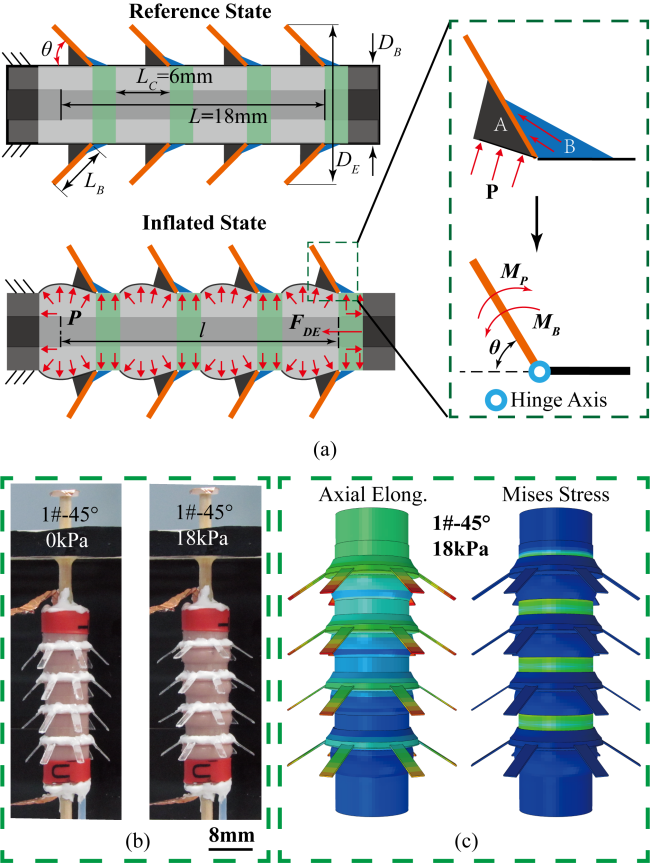
图3 主动调节鬓毛角度原理
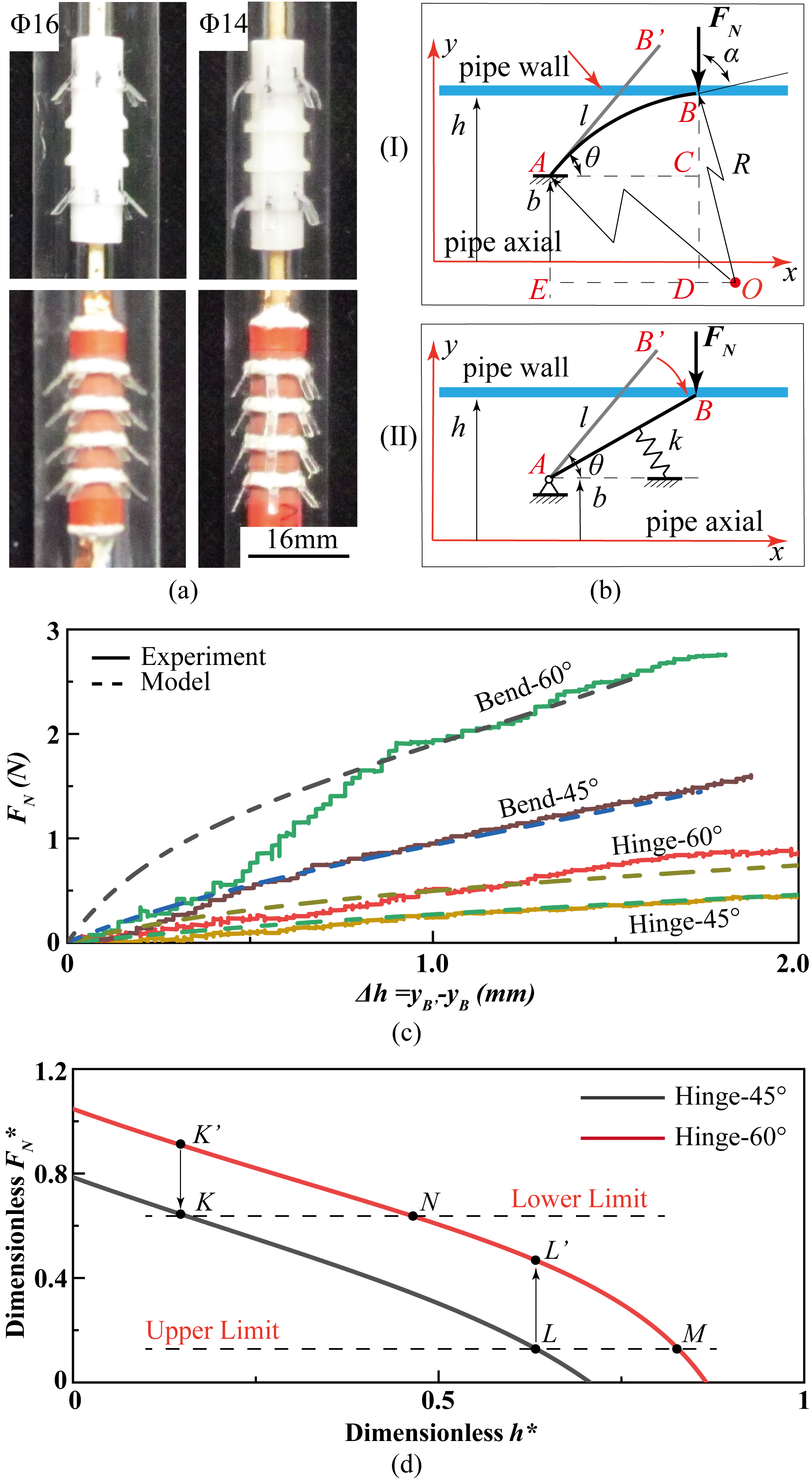
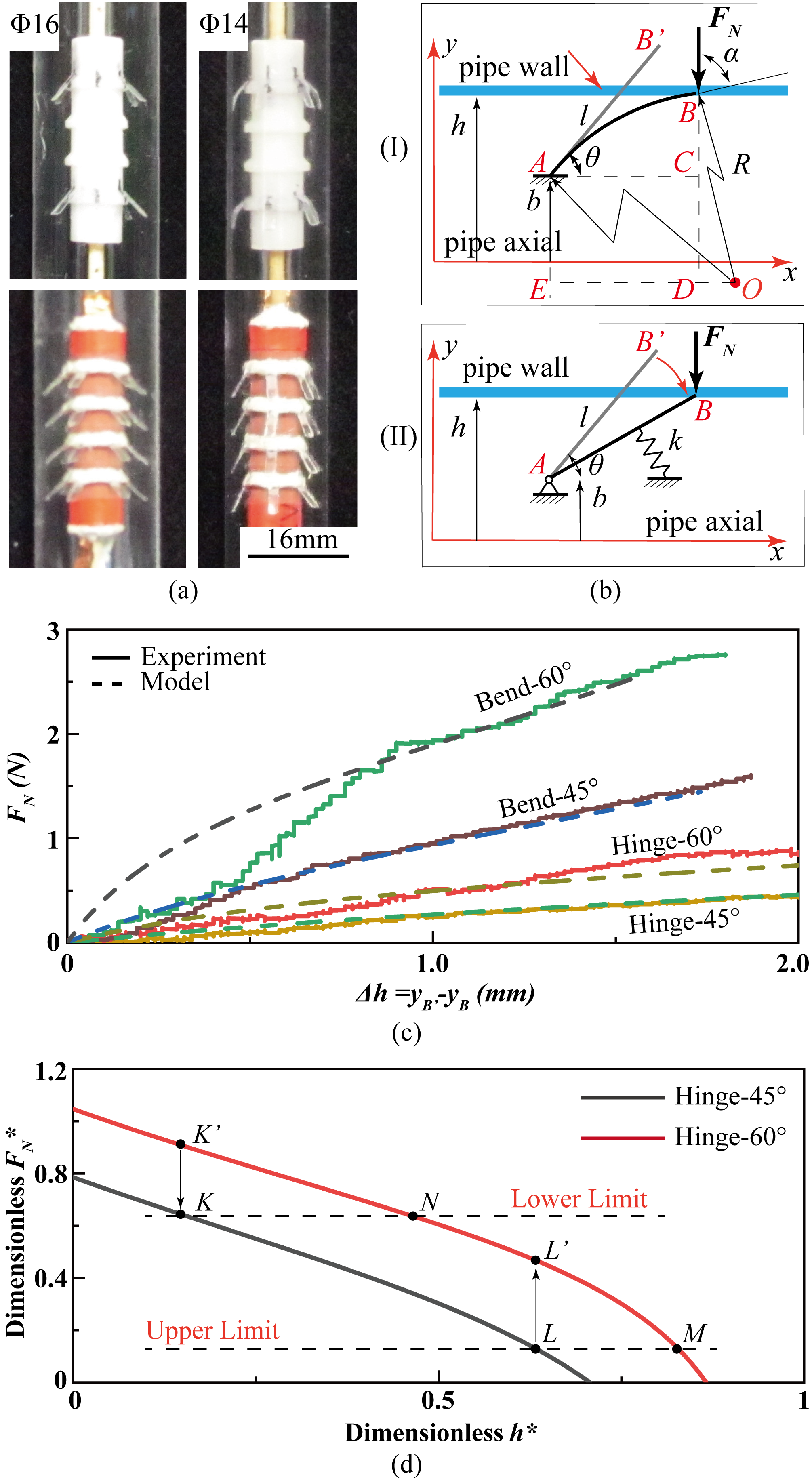
图4 柔性铰链鬓毛与传统弯曲鬓毛的对比
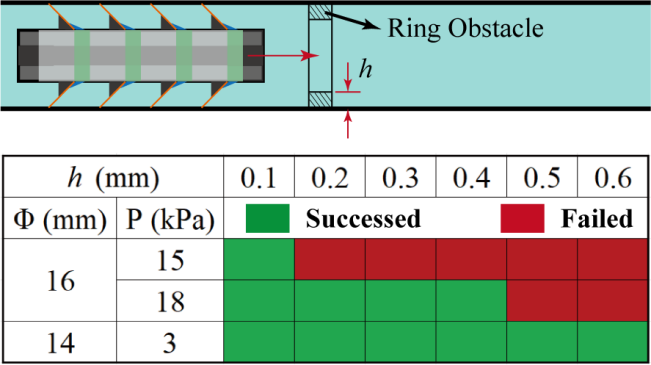
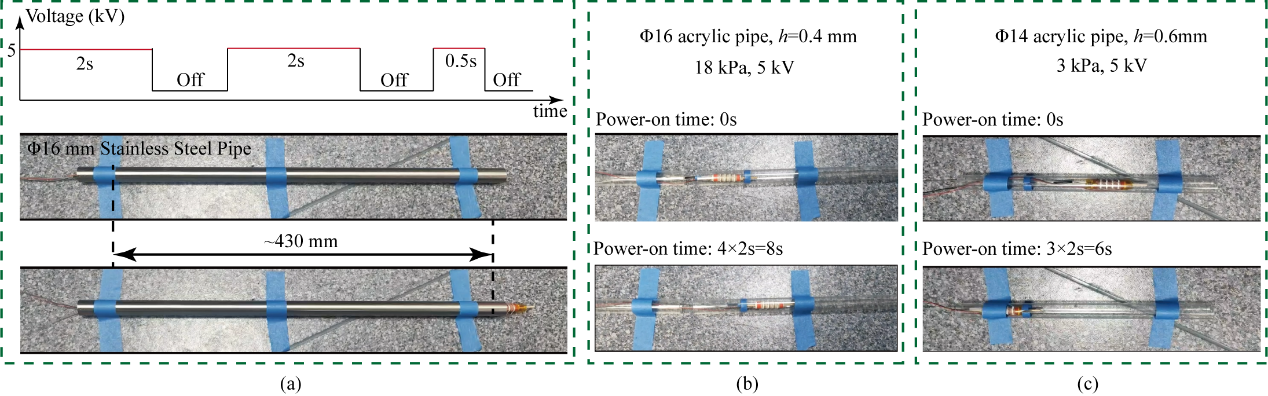
图5 机器人通过环形台阶
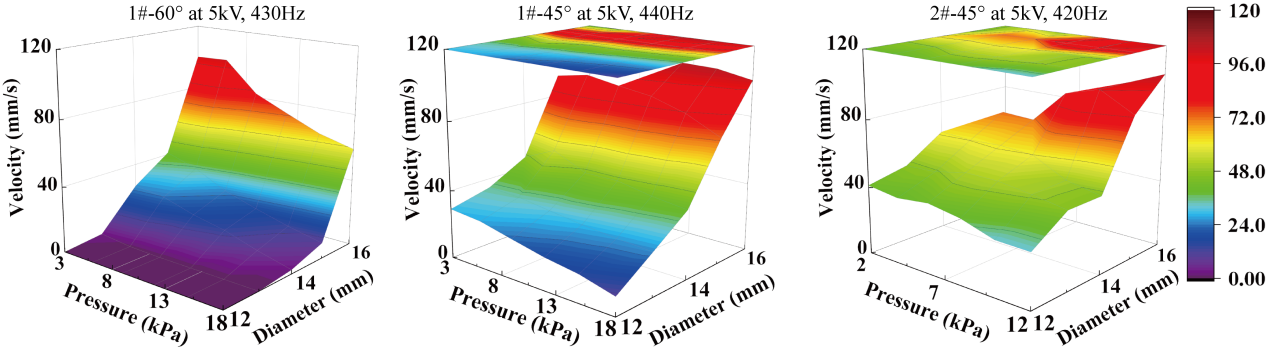
图6 机器人在DEA共振驱动下的爬行速度
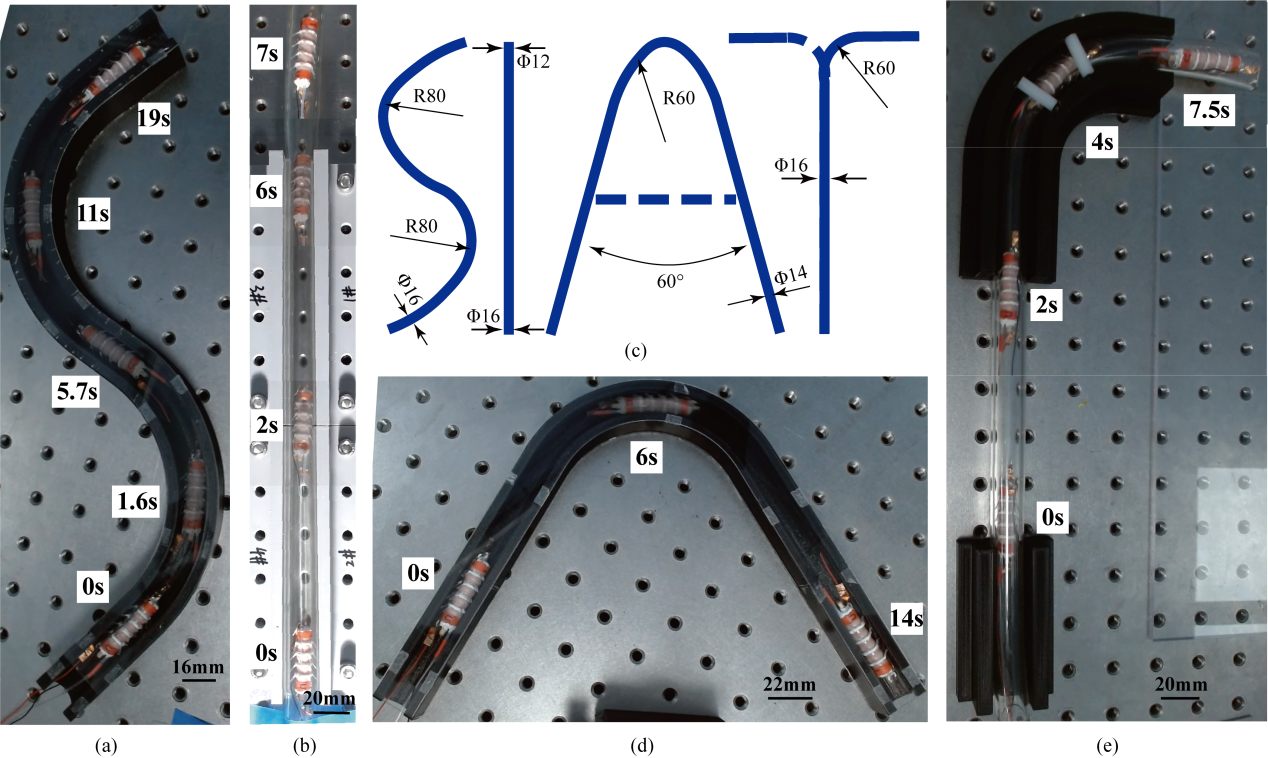
图7 机器人在弯曲及变内径管道中的爬行
附件下载:
